




KINEMATICS
LINEAR MOVEMENT
In previous topic, we have seen that a force causes a body to accelerate (assuming that it is free to move). Words such as speed, velocity, acceleration have been introduced, which do not refer to the force, but to the motion that ensues. Kinematics is the study of motion.
When considering motion, it is important to define reference points or datums (as has been done with other topics). With kinematics, we usually consider datums involving position and time. We then go on to consider the distance or displacement of the body from that position, with respect to time elapsed.
It is now necessary to define precisely some of the words used to describe motion.
Distance and time do not need defining as such, but we have seen that they must relate to the datums. Distance and time are usually represented by symbols (x) and (t) (although s is sometimes used instead of x).
SPEED
Speed = rate of change of displacement or position
= change of positiontime
Speed = xt or st
A word of caution – this assumes that the speed is unchanging (constant). If not, the speed is an average speed.
If you run from your house to a friends house and travel a distance of 1500m in 500 s, then your average speed is 5001500 = 3 m/s.
Similarly, if you travel 12 km to work and the journey takes 30 minutes, your average speed is 5.012 = 24 km/h
VELOCITY
Velocity is similar to speed, but not identical. The difference is that velocity includes a directional component; hence velocity is a vector (magnitude and direction – the magnitude component is speed).
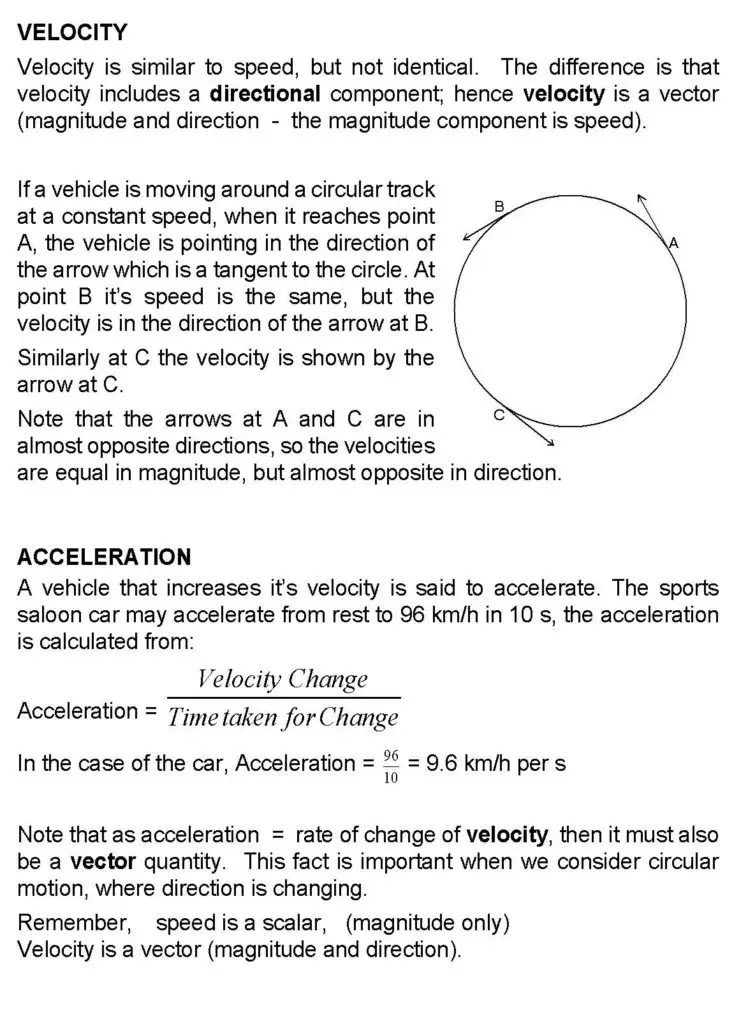
If a vehicle is moving around a circular track at a constant speed, when it reaches point A, the vehicle is pointing in the direction of the arrow which is a tangent to the circle. At point B it’s speed is the same, but the velocity is in the direction of the arrow at B.
Similarly at C the velocity is shown by the arrow at C.
Note that the arrows at A and C are in almost opposite directions, so the velocities are equal in magnitude, but almost opposite in direction.
ACCELERATION
A vehicle that increases it’s velocity is said to accelerate. The sports saloon car may accelerate from rest to 96 km/h in 10 s, the acceleration is calculated from:
Acceleration = ChangefortakenTimeChangeVelocity
In the case of the car, Acceleration = 1096 = 9.6 km/h per s
Note that as acceleration = rate of change of velocity, then it must also be a vector quantity. This fact is important when we consider circular motion, where direction is changing.
Remember, speed is a scalar, (magnitude only)
Velocity is a vector (magnitude and direction).
If the final velocity v2 is less than v1, then obviously the body has slowed. This implies that the acceleration is negative. Other words such as deceleration or retardation may be used. It must be emphasised that acceleration refers to a change in velocity. If an aircraft is travelling at a constant velocity of 600 km/h it will have no acceleration.
EQUATION OF LINEAR MOTION
Various equations for motion in a straight line exist and can be used to express the relationship between quantities.
If an object is accelerating uniformly such that:
u = the initial velocity and
v = the final velocity after a time t
The acceleration a, is given by a = timechangeVelocity or a = tuv−
This equation can be re-arranged to make v the subject:
At = v – u and from this, the most commonly used form.:
V = u + at …………………………….1
If we now consider the distance travelled with uniform acceleration.
If an object is moving with uniform acceleration a, for a specified time (t), and the initial velocity is (u).
Since the average velocity = ½(u + v) and v = u + at. We can substitute for v:
Average velocity = ½(u + u + at) = ½(2u + at) = u + ½at
The distance travelled s = average velocity x time = (u + ½at) x t So
S = ut + ½at2 ………………………….2
Using the s = average velocity x time and substituting time = auv−, and
average velocity = 2uv+
we have Distance s = 2uv+x auv−= auv222−
By cross multiplying we obtain 2as = v2 – u2 and finally:
v2 = u2 + 2as ………………………….3
These are the three most common equations of linear motion.
Examples on linear motion.
An aircraft accelerates from rest to 200 km/h in 25 seconds. What is it’s acceleration in m/s2
Firstly we must ensure that the units used are the same. As the question wants the answer given in m/s2, we must convert 200 km into metres and hours into seconds.
200 km = 200,000 m and 1 hour = 60 x 60 = 3,600 s, so 200000/3600 = 55.55 m/s
Using the equation a = tuv−, we have a = 25055.55− = 2.22 m/s2
So our aircraft has accelerated at a rate of 2.22 m/s2
If an aircraft slows from 160 km/h to 10 km/h with a uniform retardation of 5 m/s2, how long will it take.
Using v = u + at, 160 = 10 + 5t, 160 – 10 = 5t, t = 150/5 = 30s
The aircraft will take 30 s to decelerate.
What distance will the aircraft travel in the example of retardation in example 2.
We can use either s = ut + ½at2 or s = auv222−
Using the latter s = 101601022−−=1025600100−− = 2550 m
The question we must now ask ourselves is what has caused this acceleration or deceleration?
An English physicist by the name of Sir Isaac Newton proposed three laws of motion that explain the effect of force on matter. These laws are commonly referred to as Newton’s Laws of Motion.
Newton’s First Law
Newton’s first law of motion explains the effect of inertia on a body. It states that a body at rest tends to remain at rest and a body in motion tends to remain in uniform motion (straight line), unless acted upon by some outside force. Simply stated, an object at rest remains at rest unless acted upon by a force. Also, an object in motion on a frictionless surface continues in a straight line, at the same speed, indefinitely. In real life this does not happen due to friction.
Newton’s Second Law
Newton’s second law states that the acceleration produced in a mass by the addition of a given force is directly proportional to that force, and inversely proportional to the mass. When all forces acting on a body are in balance, the body remains at a constant velocity. However, if one force exceeds the other, the velocity of the body changes. Newton’s second law is expressed by the formula:
Force (F) = Mass (m) x Acceleration (a) F = m a
An increase in velocity with time is measured in metres per second per second, (m/s/s or m/s2). In the Imperial system the terms Feet per second per second (ft/s/s or ft/s2 ) are used.
Newton’s Third Law
Newton’s third law states that for every action, there is an equal and opposite reaction. When a gun is fired, expanding gasses force a bullet out of the barrel and exert exactly the same force back against the shoulder, the familiar kick. The magnitude of both forces is exactly equal but their directions are opposite.
An application of Newton’s third law is the jet engine. The action in a turbojet is the exhaust as it rapidly leaves the engine, while the re-action is the thrust propelling the aircraft forwards.
Newton’s third law is also demonstrated by rockets in space. These fire an extremely fast exhaust of hot gasses rearwards, where there is no air to act upon. It is the re-action that propels the rocket to such high speeds.
GRAVITATIONAL FORCE
When considering forces and linear/uniform motion, we should also consider the effects of gravity. A force of attraction exists between all objects, the size of this force is dependent on the mass of the objects and the distance between their centres. On Earth, there is a gravitational attraction between the Earth and everything on it. This gravitational attraction gives us our weight. It also gives free falling objects a constant acceleration in the absence of other forces.
A falling object under the force of gravity will accelerate uniformly at 9.81 metres per second for every second it falls or, the acceleration is 9.81 m/s2.
ROTATIONAL MOVEMENT
When an object moves in a uniformly curved path at uniform rate, its velocity changes because of its constant change in direction. If you tie a weight onto a length of string and swing it around your head it follows a circular path. The force that pulls the spinning object away from the centre of its rotation is called centrifugal force. The equal and opposite force required to hold the weight in a circular path is called centripetal force.
Centripetal force is directly proportional to the mass of the object in motion and inversely proportional the size of the circle in which the object travels.
Thus, if the mass of the object is doubled, the pull on the string must double to maintain the circular path. Also, if the radius of the string is halved and the speed remains constant, the pull on the string must double. This is because that, as the radius decreases, the string must pull the object from its linear path more rapidly.
ANGULAR VELOCITY
The speed of a revolving object is normally measured in revolutions per minute (R.P.M.) or revolutions per second. These units do not comply with the SI system that uses the angle turned through in one second or angular velocity. Angular velocity (ω) is the rate of change of angular displacement (θ) with time (t).
Angular velociy = takentimethroughturnedangle ω = tθ
The unit of angular velocity is radians per second (rad/s)
As there are 2π radians in 360º, an object rotating at n revolutions per second has an angular velocity of 2πn rad/s
The linear velocity of a rotating object (v) = ω x radius of rotation
So v = ωr
Example
A jet engine is rotating at 6,000 rpm. Calculate the angular velocity of the engine and the linear velocity at the tip of the compressor. The compressor diameter is 2m.
As the engine is rotating at 6,000 rpm. This is 100 revolutions per second.
There are 2π radians per revolution, so the angular velocity is equal to:
200 π rad/s or 628 rad/s
The linear velocity = ωr The radius of the compressor is 1m
The linear velocity will be 628 m/s
CENTRAPETAL FORCE
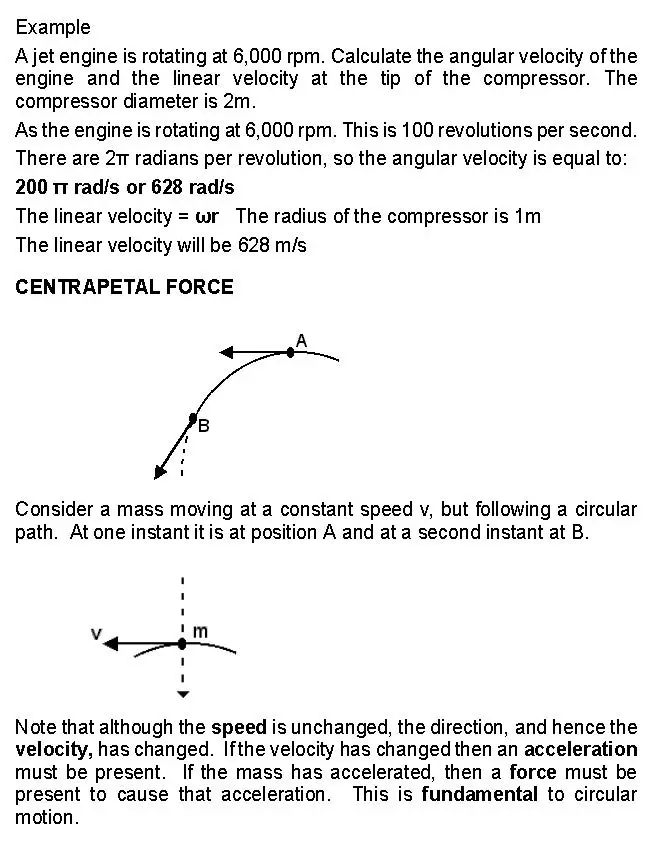
Consider a mass moving at a constant speed v, but following a circular path. At one instant it is at position A and at a second instant at B.
Note that although the speed is unchanged, the direction, and hence the velocity, has changed. If the velocity has changed then an acceleration must be present. If the mass has accelerated, then a force must be present to cause that acceleration. This is fundamental to circular motion.
The acceleration present = v2r , where v is the (constant) speed and r is the radius of the circular path.
The force causing that acceleration is known as the Centripetal Force = mv2r , and acts along the radius of the circular path, towards the centre.
CENTRIFUGAL FORCE
More students are familiar with the term Centrifugal than the term Centripetal. What is the difference? Put simply, and recalling Newton’s 3rd Law, Centrifugal is the equal but opposite reaction to the Centripetal force.
This can be shown by a diagram, with a person holding a string tied to a mass which is rotating around the person.
Tensile force in string acts inwards to provide centripetal force acting on mass.
Tensile force at the other end of the string acts outwards exerting centrifugal reaction on person.
Note: We are only concerned with objects moving at a uniform speed. Cases involving changing speeds as well as direction are beyond the scope of this course.
PERIODIC MOTION
Some masses move from one point to another, some move round and round. These motions have been described as translational or rotational.
Some masses move from one point to another, then back to the original point, and continue to do this repetitively.
Many mechanisms or components behave in this manner – a good example is a pendulum.
PENDULUM
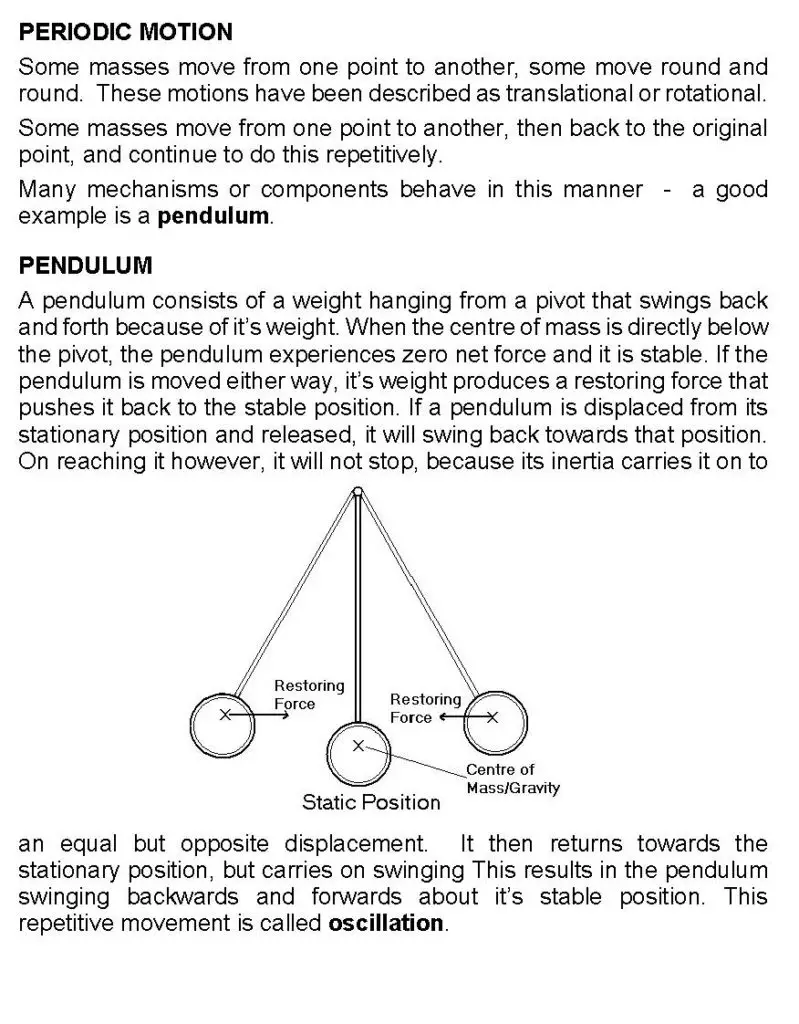
A pendulum consists of a weight hanging from a pivot that swings back and forth because of it’s weight. When the centre of mass is directly below the pivot, the pendulum experiences zero net force and it is stable. If the pendulum is moved either way, it’s weight produces a restoring force that pushes it back to the stable position. If a pendulum is displaced from its stationary position and released, it will swing back towards that position. On reaching it however, it will not stop, because its inertia carries it on to an equal but opposite displacement. It then returns towards the stationary position, but carries on swinging This results in the pendulum swinging backwards and forwards about it’s stable position. This repetitive movement is called oscillation.
The force causing the pendulum to swing is gravitational force. At the top of each swing, the pendulum has potential energy and this is transformed to kinetic energy and back to potential energy during the swing. This repetitive transformation of energy keeps the pendulum swinging.
HARMONIC MOTION
The movement of the pendulum is not just oscillatory. The pendulum is a harmonic oscillator and it is undergoing simple harmonic motion. Simple harmonic motion is a regular and predictable oscillation.
The time during which the mass moved away from, and then returned to its original position is known as the time period and the motion is known as periodic.
The period of a harmonic oscillator depends on the stiffness of the restoring force and the mass of it’s moving object. The stiffer the restoring force, the harder that force pushes the displaced object and the faster the object oscillates.
The period does not depend on the distance the object is displaced from the neutral position.
The pendulum is unusual in that it’s period does NOT depend on it’s mass. When the mass is increased, it’s weight increases and the restoring force is stiffened. The two changes balance each other and the period remains the same.
The period of a pendulum depends on it’s length and gravitational force. When the distance between the pivot and the weight is reduced, the restoring force is stiffened and the period reduces. If gravitational force is reduced, the period is increased.
For a simple pendulum (with a small amplitude) the period will be:
gLTπ2= where T is the period, L is the length of the pendulum and g is the gravitational acceleration.
On the Earth, a pendulum with a distance between pivot and centre of mass of 0.248m will have a period of exactly 1 second. The period increases as the square root of it’s length and so if the length is increases by a factor of 4 the period will double.
SPRING – MASS SYSTEMS
A spring is an elastic object. When stretched, it exerts a restoring force and tends to revert to it’s original length. This restoring force is proportional to the amount of stretch in accordance with Hookes Law.
kxFspring−= where k is the spring constant.
When the spring is stretched it has elastic potential energy which is equal to the work done in stretching the spring. The work done is equal to: 221kxWork=
If the mass is displaced from its original position and released, the force in the spring will act on the mass so as to return it to that position. It behaves like the pendulum, in that it will continue to move up and down.
The resulting motion, up and down, can be plotted against time and will result in a typical graph, which is sinusoidal.
Vibration Theory is based on the detailed analysis of vibrations and is essentially mathematical, relying heavily on trigonometry and calculus, involving sinusoidal functions and differential equations.
The simple pendulum or spring-mass would according to basic theory, continue to vibrate at constant frequency and amplitude, once the vibration had been started. In fact, the vibrations die away, due to other forces associated with motion, such as friction, air resistance etc. This is termed a Damped vibration.
If a disturbing force is re-applied periodically the vibrations can be maintained indefinitely. The frequency (and to a lesser extent, the magnitude) of this disturbing force now becomes critical.
The diagram above shows a vibration in which the displacement is constant, but depending on the frequency of the disturbing force, the amplitude of vibration may decay rapidly (a damping effect) or may grow significantly.
A large increase in amplitude usually occurs when the frequency of the disturbing force coincides with the natural frequency of the vibration of the system (or some harmonic). This is known as the Resonant Frequency. Designers carry out tests to determine these frequencies, so that they can be avoided or eliminated, as they can be very damaging. If an aircraft component starts to vibrate at it’s resonant frequency it may shake itself to pieces. For example at certain constant engine RPM an engine may vibrate to destruction.
MACHINES
In scientific terms, machines are devices used to enable heavy loads to be moved by smaller loads. There are many examples of these machines; some of which are inclined planes, levers, pulleys, gears and screws. We shall briefly describe the lever as an example of a typical machine.
LEVERS
A lever is a device used to gain a mechanical advantage. In its most basic form, the lever is a beam that has a weight at each end. The weight on one end of the beam tends to rotate the beam anti-clockwise, whilst the weight on the other end tends to rotate the beam clockwise, viewed from the side.
Each weight produces a moment or turning force. The moment of an object is calculated by multiplying the object’s weight by the distance the object is from the balance point or fulcrum.
A lever is in balance when the algebraic sum of the moments is zero. In other words, a 20 kg weight located 1 m to the left of the fulcrum (B) has a moment of negative, (anti-clockwise), 20 kilogram metres. A 10 kg weight located 2m to the right of the fulcrum has a positive, (clockwise), moment of 20 kilogram metres. Since the sum of the moments is zero, the lever is balanced. There are different categories or classes of lever as follows:
First Class Lever
This lever has the fulcrum between the load and the effort. An example might be using a long armed lever to lift a heavy crate with the fulcrum very close to the crate. In the example below, the effort ‘E’ is applied a distance ‘L’ from the fulcrum. The load, (resistance), ‘R’ acts at a distance ‘I’ from the fulcrum. The calculation is carried out using the formula:ERIL=
In the diagram an effort of 100N is required to lift a load or reaction of 200N. It follows that the distance between the fulcrum B and the effort must be twice the distance from the fulcrum and the reaction.
ERIL= or IREL×=×
Although less effort is required to lift the load (resistance), the lever does not reduce the amount of work done. Work is the result of force and distance and, if the two items from both sides are multiplied together, they are always equal.
Second Class Lever
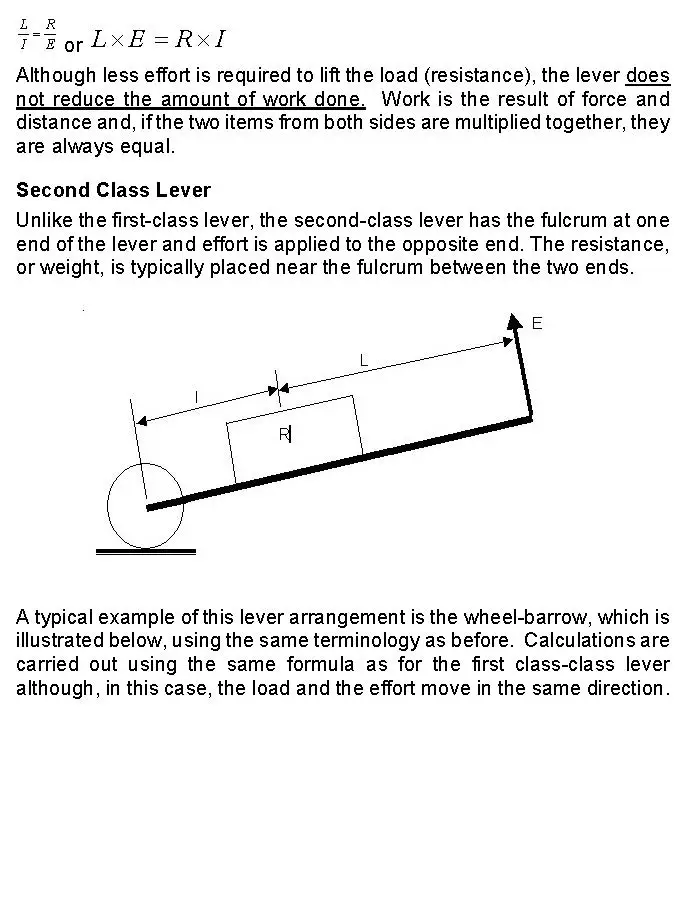
Unlike the first-class lever, the second-class lever has the fulcrum at one end of the lever and effort is applied to the opposite end. The resistance, or weight, is typically placed near the fulcrum between the two ends.
A typical example of this lever arrangement is the wheel-barrow, which is illustrated below, using the same terminology as before. Calculations are carried out using the same formula as for the first class-class lever although, in this case, the load and the effort move in the same direction.
Third Class Lever
In aviation, the third-class lever is primarily used to move the load (resistance) a greater distance than the effort applied. This is accomplished by applying the effort between the fulcrum and the resistance. The disadvantage of doing this, is that a much greater effort is required to produce movement. A good example of a third-class lever is a landing gear retraction mechanism, where the effort is applied close to the fulcrum, whilst the load, (the wheel/brake assembly) is at the end of the lever. This is illustrated below.
MECHANICAL ADVANTAGE
The advantage offered by a machine is that the effort can be very much smaller than the load. This effort can be measured and displayed as a ratio of load to effort. This is called the Mechanical Advantage (MA).
Mechanical Advantage (MA) = ELEffortLoad=
To obtain this mechanical advantage, the machine must be designed so that the input displacement of the effort is much greater than the output displacement of the load.
VELOCITY RATIO
As usual in life we do not get something for nothing. In order to obtain a mechanical advantage we usually have to move the effort force a proportionally greater distance than the load force moves.
The Velocity Ratio (VR) is a measure of the ratio of the distances.
Velocity Ratio (VR) = LEddloadofntdisplacemeOutputeffortofntdisplacemeInput=
Since both the displacements occur in the same time, this is also the ratio of the input and output velocities. The VR of a machine is a constant, since it is entirely dependent on the physical geometry given to it by its design and manufacture.
The MA of a machine varies with the load it carries, because, (except in an ideal machine), the effort required overcoming the frictional forces within the machine compares differently with the various loads applied. With a very small load, for example, more effort may be required to overcome the friction than the load itself, whereas, for a large load, the part of the effort used to overcome friction may only be a small percentage of the whole.
The situation is further complicated by the increase in the frictional forces as the loading is increased, owing to the tendency of the load to increase the normal reactions between the contact surfaces of the moving parts. For these reasons, the MA to be expected from the ideal machine is never achieved in practice. In general, however, the MA increases with the load and tends towards a limiting value.
Mechanical Efficiency
In practice, the useful work output of a machine is less than the input; the difference representing the energy wasted. This energy wastage is due to a variety of factors depending on the type of machine. One of the most common factors is friction. The losses must be reduced to the smallest possible proportions by suitable design and use of the machine. The aim should be to make the useful work output as high a proportion of the work input as possible. The measure of success achieved in this respect is called the efficiency of the machine. It is usually stated as a percentage.
Mechanical Efficiency = 100×InputWorkOutputWork OR VRMA
In a perfect machine we would have 100% Mechanical Efficiency and MA = VR
a